

(From the archive of ”bulk solids handling", article published in Vol. 32 (2012) No. 3 , ©2012 bulk-online.com)

In every machine there is always a challenge to design a drive chain as close as possible to the output required. If the requirement follows a defined cycle, the solution becomes easy. However, if the output is not cyclic and maximum load differs widely from normal operating load, safest solution is to select a drive which is compatible for both maximum load and maximum speed. But this approach keeps the full capability of the drive unutilised.Many such instances are observed in bulk material handling equipments. But this issue has been dealt by automobile industry from the inception. at the beginning, maximum torque and speed were broken down into several stages or gears. Later on, automatic transmission came up to meet the requirement more precisely. The possibility of adopting the developments carried out by automobile industry on material handling equipments is discussed here, with a focus on variable displacement hydraulic drives. Considerable amount of saving to the tune of 20 to 30 percent is expected on capital and revenue cost. Equipments are also expected to be compact, lighter and more efficient.
Drives in Material Handling
In bulk material handling equipment maximum load differs widely from that of normal and sustains there for a considerable period except wagon tippler, vibrating screen and feeder, crusher, belt conveyor etc, where the load cycle is fairly defined. In apron feeder, plough feeder, bucket wheel reclaimer load cycles hardly follow any defined path.Varying characteristics of material, moisture content and operating conditions like load due to hopper, material heap etc. do not allow the equipment drive to follow any predetermined path. Hence, in normal practice, the drive system is selected on the basis of maximum torque (or force) and maximum speed required. as a result, the installed power of prime mover becomes enormous which takes care of both maximum torque and maximum speed simultaneously. But in actual operation torque and speed need not be at their peak simultaneously.
Drives in Automobiles
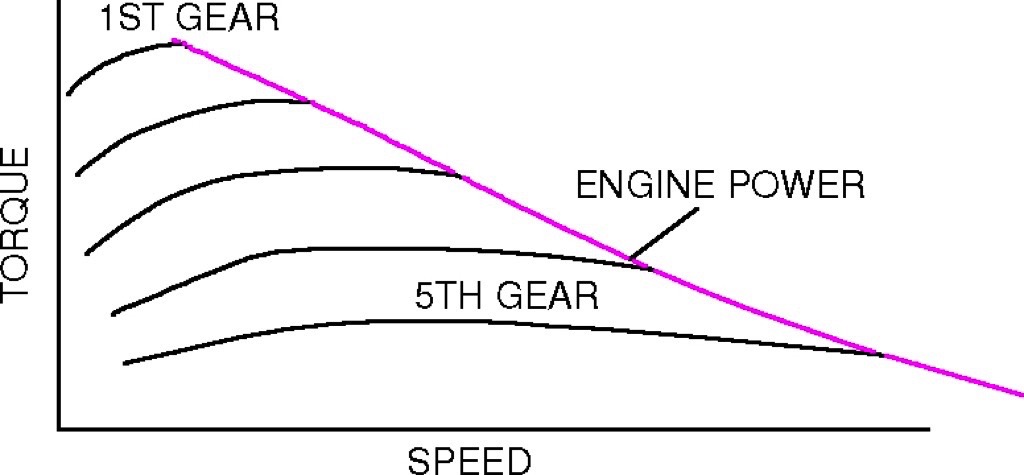
In case of automobiles, reduction of power and weight of drive components being the prime concern, efficient solution was evolved at the initial stage. accordingly, torque required by automobiles is subdivided into 4, 5 or 6 stages or gears. at each stage or gear there is a limit on torque and consequently a limit on speed. Power determined by combination of torque and speed at different stages are normally constant and satisfy the installed power considering losses. This allows the machine to run on an optimum installed power where highest torque is available at low speed, and highest speed at low torque passing through intermediate stages.
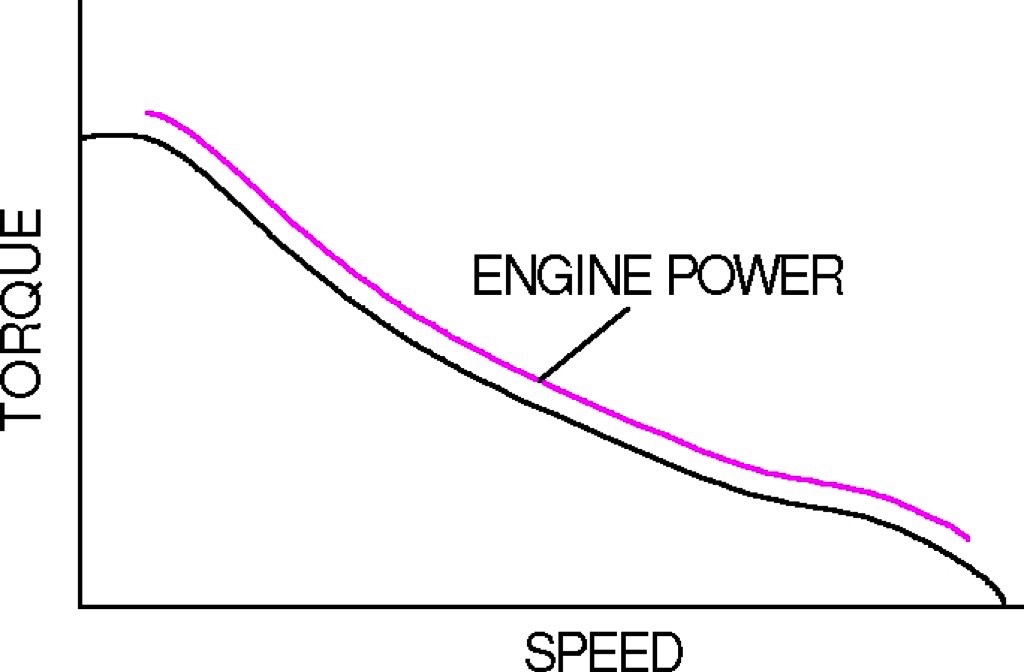
Technology of automobiles and mobile machinery has moved far ahead by adopting automatic transmission using mechanical, hydrodynamic (torque converter) and hydrostatic systems. Use of variable displacement hydraulic motor in hydrostatic transmission of off highway vehicles is widely accepted. Computerised electronic and hydraulic controls have played immense role to match the torque/ speed requirement with the output of prime mover. Introduction of this technology enhance the comfort and usability of the vehicle in one hand and optimise the installed power and fuel consumption on the other hand.
Adoption of Technology
In stationary equipments of material handling special care has been taken to handle high starting torque applications. Hydrodynamics and hydrostatics are in use selectively, but still there is enormous scope to exploit the full potential of both the technology not only in starting but also in running throughout the cycle.
In case of high starting torque, fluid coupling accelerate the machines smoothly where static torque is fairly uniform. If the static torque is much less than what presumed, torque available for starting will be more and hence acceleration will be higher. Chances of vibration will increase. On the other hand, if static torque is more, prime mover will not have sufficient torque available for starting and the machine will have a tendency to stall.Delayed fill fluid coupling can marginally improve the situation but it remains uncontrolled for widely varying load. Fluid couplings cannot vary the magnitude of transmitted torque depending on the load. Torque converters can increase the torque imparted by the prime mover to some extent but have very low efficiency and limited range. Hydrostatic Drive and Variable Frequency Drive can have a fully controlled start irrespective of variation in load or torque and hence, remove all the limitations of fluid coupling and torque converter. Here, discussion will be confined to hydrostatic (hydraulic) drive only.In hydrostatics, control of start is extensively used in well defined manner through variable displacement pumps. Displacement or flow of pump is increased along a predetermined ramp by electronic controls. But the variation of load / torque is automatically managed by variation of pressure in the system. Relief or Pressure limit mechanism protects the system from overload and drawing overpower. In stationary equipments and also in slow moving mobile machines, the hydraulic motors are mostly of fixed displacement type and selected on the basis of highest torque and highest speed. The installed power of prime mover is decided accordingly taking into account efficiencies. But in actual application simultaneous requirement of maximum torque and maximum speed is unusual. High torques encountered during running are for short period and not instantaneous. They dwell for some time, say 30 to 40 seconds and are also necessarily considered maximum torque for selection of hydraulic motor of variable displacement type, but highest speed is not any criteria at that displacement.Speed of machine decides the flow required by hydraulic motor and thereby, size of the pump. As the normal operating torque is much lower than the maximum torque, the motor runs at much lower torque than its rating during normal running. During the period of high torque, speed can be lowered proportionately, which will not have any significant effect on capacity and performance of the machine.Fixed displacement motor having high displacement at all operating condition increases the flow requirement and hence the size of the pump. But, variable displacement motor or at least a dual displacement motor can reduce flow requirement and thereby reducing size of pump, associated valves, reservoirs, piping cooler / heater etc. Finally the size of prime mover also gets reduced. When all component sizes are reduced power losses also reduces.
Applications Examples

In Paddle Feeders, operating under hoppers, are subjected to high starting torque. In addition high torque is encountered due to compaction of material, particularly when the machine is started after a long shut down. During operation also sometimes the discharge arms have a tendency of getting jammed or close to jamming situation. Paddle Feeder manufacturers generally keep a provision of at least 50 percent higher torque than the normal operating torque to cover up the requirement during starting and jamming situation. Nowadays, some users demand 100 percent.During starting or jamming higher speed naturally have no significance and hence, selection of variable displacement motor with maximum displacement matching with the highest torque can reduce the flow requirement considerably. Consequently the size of the prime mover, pump and the components are reduced by 33 percent, where the margin on normal torque is 50 percent.The comparison in Table 1 is self explanatory. The adoption of variable displacement hydraulic motor reduces size of installed motor, pumps, coolers, piping and as a whole overall weight of power unit, which enables the machine to become more compact. As the size of drive components are reduced, power losses also tend to reduce. Ultimately there is a huge cost saving both to the manufacturer and user.
| Characteristics of drive unit for paddle feeder | Fixed displacement motor | Variable displacement motor | |
| Normal torque | 18000 Nm | 18000 Nm | |
| Max torque | 27000 Nm | 27000 Nm | |
| Max speed | 12 rpm | 12 rpm | |
| Working pressure, Δp | 200 bar | 200 bar | |
| Pump flow | 113 l/min | 75 l/m | |
| Consumed power for normal operation | 28 kW | 28 kW | |
| Max. consumed power | 42 kW | 28 kW | |
| Installed motor power | 45 kW | 30 kW | |
| Tank capacity | open loop | 450 l | 250 l |
| closed loop | 150 l | 100 l | |
| Size of piping | 11⁄4" NB | 1" NB | |
| Size of cooler | 113 l/min | 75 l/min | |
| Approx unit of power unit | 2000 kg | 1400 kg | |
As in Paddle Feeder, in case of Apron Feeder and Belt Feeder also extra torque over and above the normal operating torque. Here also, variable displacement motors can manage the situation effectively.

In wagon positioning equipment like Side Arm Charger, motors are generally selected to satisfy high pull for full rake associated with some faulty brakes. The system remains under-utilised when such adverse situation does not exist and number of wagons in the rake gets reduced. Variable displacement motors can manage all such conditions judiciously by using much lower capacity prime mover and power unit.There may be many other applications in material handling where variable displacement motor can replace fixed displacement. Reduction in sizes of prime mover and other drive components as explained can be obtained if investigated thoroughly.
Types of Control
Several choices are available for the control of displacement – purely hydraulic and hydraulics interfaced with electrical / electronic controls. Automatic control of displacement by receiving input signal from system pressure is ideal. In this system motor operates at minimum displacement up to a predetermined pressure limit and beyond that the displacement gradually increases depending upon the demand torque. The limit is maximum displacement capable of delivering highest torque. The speed of the machine decreases accordingly and remains slow as long as the displacement is at highest level. As this high torque or close to jamming situation prevails for a short duration, the lowering of speed does not affect overall feed rate of the machine.
Types of Motors
In high torque applications of bulk material handling, generally radial piston and axial piston motors are used for their high efficiency, high pressure rating and high power to weight ratio. But infinite variation in displacement is available in axial piston units only. Several unique control mechanisms are also available to meet the application requirement. Axial piston motors are of high speed type, hence are to be used with an intermediate gear reducer. On the other hand Radial Piston units may or may not require any gear reducer, but infinitely variable displacement is not possible. They have dual displacement mechanism, which cannot meet the features and controls available with infinitely variable axial piston units.
Conclusion
The benefits of variable displacement hydraulic motors in material handling equipments are:
- lower installed power
- lower size of drive components and hence a compact machine
- reduced losses and hence lower power consumption
- considerable amount of cost saving
A Note from the Editor
For all statements in this article that refer – directly or indirectly – to the time of publication (for example “new”, “now”, “present”, but also expressions such as “patent pending”), please keep in mind that this article was originally published in 2012.
| About the Author | |
| C.B. RayDirector and OwnerTechgroup Solutions, India |
■

